From Xenomai 2 to Xenomai 3
In the early days, Linux-based applications with stringent response time requirements had to be controlled by a real-time co-kernel running side-by-side with the Linux kernel, except in the seldom cases where depending on a heavily modified Linux variant was acceptable. In such a dual kernel configuration, applications behaved as totally foreign code, strictly isolated from the common Linux environment. Some co-kernel variants would even require those applications to live in kernel space, due to a lack of user-space support.
Xenomai 2 introduced a more common programming model for real-time applications within regular Linux processes, not just running as kernel modules in user-space, but truly as real-time capable Linux applications, blurring the boundaries between the co-kernel and regular Linux programming environments, so that common tools such as GDB could be safely used to debug real-time applications for instance.
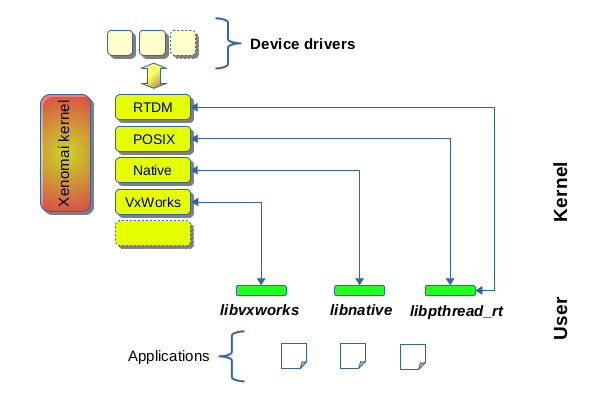
Xenomai 2 implements a Linux-hosted dual kernel system based on the legacy I-pipe (aka Adeos), a discontinued real-time enabling layer for the Linux kernel. This simple interrupt virtualization layer induces only a negligible runtime overhead, and can be ported to a new architecture fairly easily. For these reasons, this mature option is preserved in Xenomai 3.
However, the following issues have to be considered:
-
Xenomai is all about RTOS APIs
-
dual kernel is not the only way to real-time
-
real-time may not even be required in some cases
-
-
kernel space is hostile to foreign APIs
-
debugging is complex
-
extending APIs bloats the kernel
-
-
kernel space is no place for applications
- this may cause wrong software designs
As the ongoing PREEMPT_RT effort delivers on the short and bounded latency promise with a single kernel configuration on selected hardware platforms for which this technology is available and mature, it creates opportunities to extend the relevance of Xenomai as a migration tool, so that moving an application to such a system does not necessarily entail porting the code over the POSIX API.
Xenomai 3 seized this opportunity, by enabling the Xenomai APIs for dual kernel and native Linux configurations. In that sense, Xenomai 3 is a paradigm shift, because Xenomai is no more tied to the dual kernel architecture. Instead, it supplements the Linux kernel with a co-kernel only when necessary.
Such evolution requires the real-time application code to live in user-space, regardless of whether the dual kernel or native configuration is used. In turn, this makes the common device driver / application code split design most desirable, with RTDM exporting the same interface to both environments.
The Xenomai 3 architecture
Xenomai 3 is the new architecture of the Xenomai real-time framework, which can run seamlessly side-by-side Linux as a co-kernel system like Xenomai 2, or natively over mainline Linux kernels. In the latter case, the mainline kernel can be supplemented by the PREEMPT-RT patch to meet stricter response time requirements than standard kernel preemption would bring.
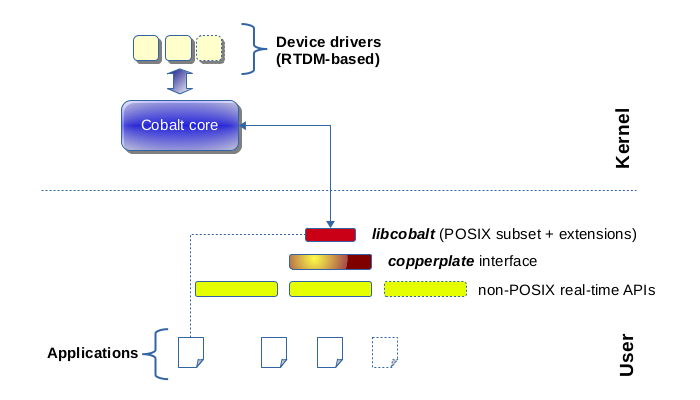
This new architecture therefore exhibits two real-time cores, selected at build time. The dual kernel nicknamed Cobalt, is a significant rework of the Xenomai 2.x system. Cobalt implements the RTDM specification for interfacing with real-time device drivers.
The native linux version, an enhanced implementation of the experimental Xenomai/SOLO work, is called Mercury. In this environment, only a standalone implementation of the RTDM specification in a kernel module is required, for interfacing the RTDM-compliant device drivers with the native kernel.
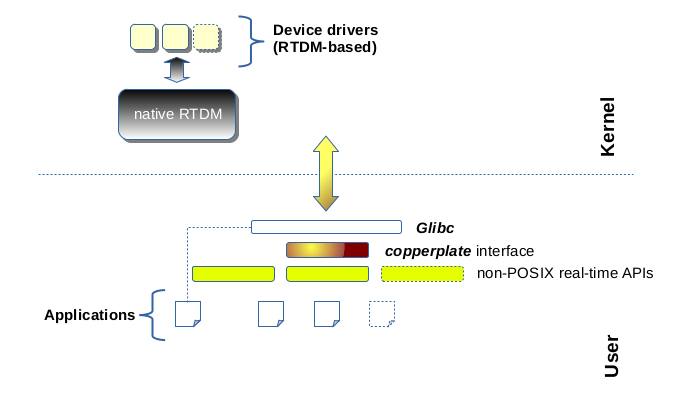
This magic works with the introduction of the Copperplate interface, which mediates between the real-time API/emulator your application uses, and the underlying real-time core. This way, applications are able to run in either environments without visible code change.
Main pointers
For the impatient, here is a list of URLs to the main resources:
Changes brought by Xenomai 3
Non-POSIX APIs available in native kernel configuration
Xenomai 3 implements all non-POSIX RTOS APIs/emulators in user-space, based on building blocks provided by the Copperplate library. Compared to Xenomai 2, this has several advantages:
-
these APIs may run over a dual or single kernel configuration indifferently, and the same goes for the applications built over them.
-
IPC mechanisms implemented by these APIs which commonly involve data transfers between real-time threads do not need to channel this data through a kernel syscall anymore. Instead, such transfer happens directly from user-space, even for multi-process applications (e.g. message queues, or buffers).
Typically, users of the Alchemy API - formerly known as the native Xenomai API - will likely see better performance figures in thread-to-thread communications.
RTDM improvements
New device description model
The major changes are aimed at narrowing the gap between the regular Linux device driver model and RTDM even more, based on new driver and device description models.
As a result of this, not only the RTDM API is common between the single and dual kernel configurations, but both expose devices the same way in the regular Linux device namespace.
This means that RTDM device properties can be inspected via sysfs, even in a dual kernel (i.e. Cobalt) configuration.
API extension
-
A wait queue construct very similar to the Linux kernel wait queues is available from the driver API. This allows for fine-grained synchronization on arbitrary events and conditions.
-
The RTDM specification was extended with providing mmap() support from drivers, which Xenomai 3 implements.
Additional features in dual kernel mode
Support for real-time signals
The Cobalt kernel implements POSIX-compliant signals sent and received
fully from primary mode. The sigwait(), sigwaitinfo(),
sigtimedwait(), sigqueue(), kill() and pthread_kill() calls are
available as Xenomai services.
Support for timerfd
The timerfd API has been introduced. It is available as a set of Cobalt services, delivered in real-time mode.
New scheduling policies
- SCHED_QUOTA
The SCHED_QUOTA policy enforces a limitation on the CPU consumption of threads over a globally defined period, known as the quota interval. This is done by pooling threads with common requirements in groups, and giving each group a share of the global period.
When threads have entirely consumed the quota allotted to the group they belong to, the latter is suspended as a whole, until the next quota interval starts. At this point, a new runtime budget is given to each group, in accordance with its share.
- SCHED_WEAK
Members from the SCHED_WEAK class are weakly scheduled by Xenomai, only for the purpose of synchronizing with real-time threads from other scheduling classes. However, they cannot compete for CPU resources with real-time threads, and leave the primary domain upon return from Xenomai syscalls automatically.
This policy is an extension of Xenomai’s special handling of the SCHED_OTHER policy to members of the SCHED_FIFO and SCHED_RR classes from a regular Linux kernel. In other words, it is now possible to run threads which belong to the lowest priority class Xenomai-wise and to the SCHED_FIFO or SCHED_RR class in the regular kernel at the same time.
Other optimizations
-
The POSIX condition variable mechanism implemented by the Cobalt core has a significantly lower overhead, as it saves two useless context switches in a common situation.
-
The POSIX semaphores available with Cobalt gained the fast synchronization mechanism, directly performed from user-space without system call when no contention exists on the resource. This means that all basic Cobalt-based IPCs, namely POSIX mutexes, condition variables and semaphores, use syscall-less operations whenever possible.
Better debugging tools
- The slackspot utility has been introduced to help spotting code locations in applications causing spurious relaxes of real-time threads, at source level. Unlike the former approach based on decoding manually the backtrace information from SIGXCPU handlers in each application individually, slackspot combines a dedicated kernel support which logs the trace data about spurious relaxes, and a userland utility which parses this data to display the program backtrace. With the additional help of symbol and context filters, slackspot helps in locating the offending code easily.
Extending Cobalt kernel services
The Cobalt kernel introduces a mechanism for extending/modifying the behavior of the core services it implements by mean of RTDM drivers. Any such driver may extend the Cobalt kernel with personality bits, for delivering custom variations of standard services, or even new services.
Transition Kit for easy migration
Xenomai 3 comes with a Transition Kit available as a library and a set of headers, which provides wrappers, converting the former POSIX and native APIs calls differing or absent in Xenomai 3, to the newer POSIX/Cobalt and Alchemy APIs respectively.
Support for user-space device drivers
In the seldom cases where running a device driver in user-space is the best option, one may rely on the RTDM-based UDD framework shipped with Xenomai 3. UDD stands for User-space Device Driver, enabling interrupt control and I/O memory access interfaces to applications in a safe manner. It is reminiscent of the UIO framework available with the Linux kernel, adapted to the dual kernel Cobalt environment.
Support for mixed 32/64 bit ABIs
The Cobalt core can run 32bit applications over a 64bit kernel on architectures which support the mixed ABI model. Currently, Cobalt supports the x32 and ia32 emulation ABIs over x86_64.
Xenomai 3 FAQ
Q: I can run POSIX based applications directly over a PREEMPT_RT kernel on my target system, so what is the point of running Xenomai 3?
A: If your application is already fully POSIXish, and the performances requirements are met, then there is likely no point. However, you may want to consider Xenomai 3 in two other situations:
-
you want to port a legacy embedded application to Linux without having to switch APIs, i.e. you don’t want to rewrite it on top of the POSIX interface. Xenomai may help in this case, since it supports multiple programming interfaces over a common real-time layer, including emulators of traditional RTOS APIs. Xenomai 3 makes those APIs available to a PREEMPT_RT based system as well.
-
the target hardware platform has limited horsepower, and/or you want the real-time job to put the smallest possible overhead on your system. This is where dual kernels are usually better than a native preemption system. With the latter, all parts of the Linux system have to run internal code that prevents real-time activities from being delayed in an unacceptable manner (e.g. priority inheritance mechanism, threaded IRQ handlers). In a dual kernel system, there is no need for this, since the real-time co-kernel runs separately from the normal Linux kernel. Therefore, Linux is not charged for real-time duties, it does not even have to know about them.
In short, it depends on various factors, such as your API of choice, the performance requirements, and the target hardware capabilities. This has to be evaluated on a case-by-case basis.
Q: I want to port a RTLinux/RTAI application running in kernel space to Xenomai. Since Xenomai 3 discontinues kernel space APIs, should I pick Xenomai 2 then?
A: We strongly discourage this: Xenomai 2.x is EOL since January 2016; as such it is no more maintained by the Xenomai project. You may want to seize this opportunity to move your code to user-space instead, and fully benefit from the standard programming model Xenomai 3 introduces.
Q: I want to port a legacy VxWorks™ or pSOS™ application to Xenomai. After some analysis, I concluded that I should port my code over the relevant kernel-based APIs. I have a single address space there, permanent supervisor privileges, direct access to device memory and ports, everything looks similar to my original runtime environment. Since Xenomai 3 discontinues kernel space APIs, should I pick Xenomai 2 then?
A: Same answer as previously. In addition, your original code is likely under a proprietary license that does not mix well with the GPL that rules the Linux kernel. Moving all your proprietary code to user-space would probably solve such license issue. Xenomai libraries are licensed under the terms of the LGPL v2.1.
Xenomai 3 will support those APIs in user-space, so you may want to reconsider the issue differently:
-
a multi-threaded Linux process provides a single address space as well, but with the added bonus of memory protection. So tasks/threads running your application could still share variables and code easily, but would not be able to crash the system by corrupting the kernel memory.
-
many legacy RTOS do not provide strong device driver semantics, and in such environments, application code may do device management informally as it sees fit. However, keeping the option of porting your code to a native Linux environment open, will require that you do follow the device driver / application split. So you may want to tackle the issue upfront and only once, and port your driver code over RTDM directly, which will keep your options open afterwards; i.e. between relying on native preemption or a dual kernel system.
Q: Does the more common programming model followed by Xenomai 3 mean that we will not be able to implement device drivers in user-space?
A: No. It basically means that you will not get any support from Xenomai 3 to implement application code in kernel space. The only API available from kernel space with Xenomai 3 is RTDM, for implementing real-time device drivers.
Q: I am currently running an application in user-space over Xenomai 2, what will change for me with Xenomai 3?
A: The situation is as follows:
- if you want to keep using a dual kernel configuration, the target system will have to run Linux kernel 3.10 or later.
This requirement does not apply to a single kernel configuration, for which you may pick whatever kernel version you see fit.
-
most applications currently based on the POSIX API should be portable as is to Xenomai 3. An exhaustive list of all the user-visible changes is available at this address. Most of these variations are handled by the Transition Kit, see below.
-
likewise, applications currently based on the former native API should move easily over the Alchemy API. An exhaustive list of all the user-visible changes is available at this address. Most of these variations are handled by the Transition Kit, see below.
-
pSOS™ and VxWorks™ applications should not see any change. You may refer to this address for a couple of updates to the pSOS emulator, and to this address for updates to the VxWorks emulator.
-
at the moment, applications based on the uITRON and VRTX™ APIs are not portable to Xenomai 3, since the corresponding emulators are not available in this environment yet.
Xenomai 3 comes with a compatibility layer named the Transition Kit, consisting of a library and a set of header files which provide wrappers. Applications based on the POSIX and former native APIs can directly benefit from it.