Overview
Xenomai 3 is a real-time framework which can run seamlessly side-by-side Linux as a dual kernel system, or natively over mainline Linux kernels. In the latter case, the mainline kernel can be supplemented by the PREEMPT-RT patch to meet stricter response time requirements than standard kernel preemption would bring.
One of the two available real-time cores is selected at build time. The dual kernel core is codenamed Cobalt, the native Linux implementation is called Mercury.
If you are looking for detailed information about installing the legacy Xenomai 2.x series, please refer to this document instead. Please note that Xenomai 2.x is discontinued and not maintained anymore.
How does Xenomai 3 deliver real-time?
There are two options:
-
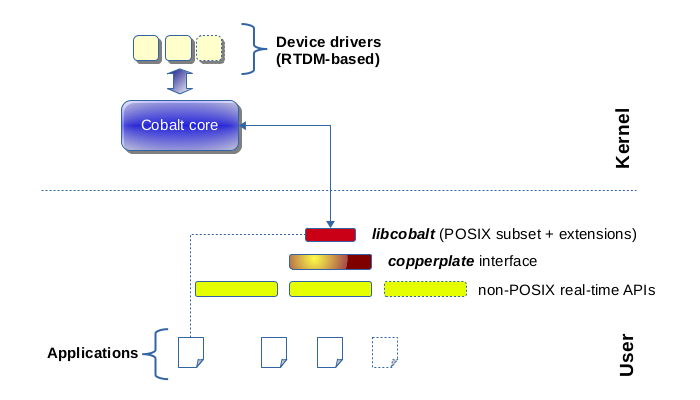
By supplementing Linux with a real-time core running side-by-side with it. This small extension named Cobalt is built into the Linux kernel, dealing with all time-critical activities, such as handling interrupts, and scheduling real-time threads. The Cobalt core has higher priority over the native kernel activities.
In this dual kernel configuration, all the RTOS APIs Xenomai 3 provides interface with the Cobalt core, and only those APIs are deemed real-time capable, including the subset of POSIX 1003.1c services implemented by Xenomai 3 (aka libcobalt).
Cobalt is an evolution of the legacy Xenomai 2 architecture.
-
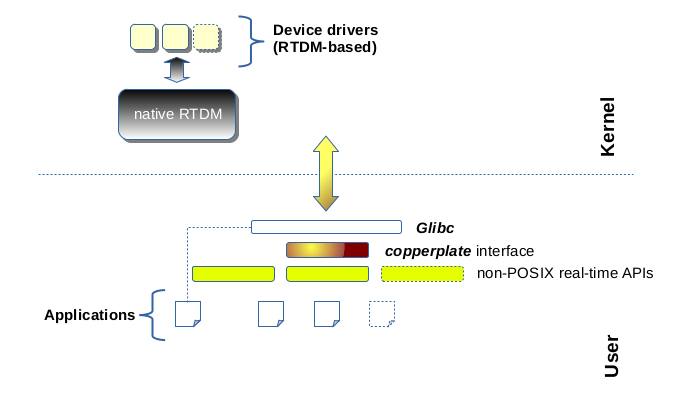
By relying on the real-time capabilities of the native Linux kernel, forming the Mercury core. Often, applications will require the PREEMPT-RT extension to be enabled in the target kernel, for delivering real-time services.
However, this is not mandatory, it depends on the application requirements with respect to responsiveness and maximum jitter; some may even tolerate a certain percentage of deadline misses.
In this single kernel configuration, all the non-POSIX RTOS APIs Xenomai 3 provides are accurately emulated over the native threading library (preferably NPTL, but also supports linuxthreads for legacy setups).
Xenomai 3 supports both the single and dual kernel configurations. The discontinued Xenomai 2 architecture only supported the dual kernel configuration.
Supported hardware
Xenomai 3 is supported on a variety of hardware. The ports we know about are listed here.
Xenomai 3 license terms
All Xenomai 3 code running in kernel space is licensed under the terms of the Linux kernel license, i.e. GPL v2. Xenomai libraries linked to applications are licensed under the terms of the LGPL v2.1. For information regarding a particular software component, you should look at the COPYING file available in the directory containing the relevant source code.
Preparation checklist
Single or dual kernel configuration?
Assuming you know the target SoC and the application requirements with respect to real-time guarantees, you should define which of the single or dual kernel configurations best fits your needs. The following hints may help:
-
Does your application actually have real-time requirements, and how stringent are they? If migrating an application from an embedded RTOS to a Linux-based platform, the question may stand because unlike legacy RTOSes, Linux sees embedded and real-time characteristics as orthogonal issues. Some migrated applications may even be fine with only emulating the original RTOS API over a regular kernel and standard preemption (CONFIG_PREEMPT). Those may benefit from Xenomai 3 in single kernel configuration.
-
For stringent real-time requirements, you should consider the availability of the hard real-time support for your target SoC architecture and Linux kernel version.
-
Hardware support for Xenomai 3 in dual kernel configuration can be viewed here. This approach is based on a kernel software layer which introduces a mechanism for diverting all critical events to a dual kernel extension core, coupled to the host Linux kernel. This mechanism called Dovetail implements an Interrupt pipeline.
-
For a single kernel configuration, the list of target architectures supporting the full preemption features (aka PREEMPT-RT) is available here.
-
-
How many CPU cores will be involved in real-time operations?
-
in a dual kernel configuration, the Xenomai 3 Cobalt core normally benefits from its simpler locking scheme when dealing with real-time activities concurrently on not more than four CPU cores.
-
Beyond four CPU cores running real-time activities, SMP scalability will be better with a single kernel configuration.
-
-
The key issue is with the number of CPU cores actually running real-time threads and receiving interrupts from real-time sources, not with the overall number of cores on line on the target hardware. Because the Cobalt cocore does not share any lock with the regular Linux kernel when dealing with real-time activities, a 16-way server pinning such activities on not more than four of the available cores would still deliver good performances in a Cobalt-based dual kernel configuration.
Info
If you need a SMP scalable real-time core, then you may want to consider Xenomai 4 instead. The EVL core underlying Xenomai 4 implements a fine-grained locking model which does not suffer the scalability issue of its predecessor.
-
Is any of those dual kernel pros critical to your case?
-
porting the Cobalt core to a new architecture is fairly simple.
-
it is decoupled from the development cycle of the mainline Linux kernel, thus allowing to pick the desired (or required) kernel version more freely.
-
it can simplify the worst-case analysis and keeps the results valid over update cycles of the mainline Linux kernel which hosts it.
-
it allows to fine-tune the non-real-time part for throughput without negative impact on the real-time job.
-
it does not require any tuning of the regular Linux system to guarantee short and bounded latencies for the real-time job.
-
-
Is any of those single kernel pros critical to your case?
-
the stock kernel drivers can be reused by real-time applications with no change (provided they don’t create latency issues due to an unfortunate implementation). On the other hand, drivers need to be specifically implemented for running over a dual kernel configuration, i.e. over the in-kernel RTDM interface.
-
the programming model may be simpler than with a dual kernel configuration, since the kernel is deemed to enforce real-time behavior globally. This said, cautious application design and implementation must be a common rule regardless of the underlying real-time technology, as not all available services may be suited for real-time usage.
-
all standard utilities for monitoring the system operations can report about the real-time activities out of the box. On the other hand, a dual kernel system has to adapt such tools specifically for this purpose.
-
Do you need non-POSIX real-time APIs?
Porting legacy non-POSIX applications to POSIX may not be the best option. Although there may be similarities, the semantics of traditional RTOS APIs may differ significantly from POSIX in many cases, which often makes the migration process quite painful and error-prone.
Xenomai 3 ships with emulators of traditional RTOS APIs, like VxWorks™ and pSOS™, both available in single and dual kernel configurations. Xenomai 3 aims at accurately mimicking the original services with low overhead.
However, maybe Xenomai 3 does not provide an emulator yet for the API you are looking for, or some services are missing from the existing emulators, in which case you should consider raising the topic on the e-mail discussion list. Xenomai 3 is based on generic building blocks for implementing RTOS APIs, so extending it is a documented option.
Using GIT
The Xenomai project uses GIT for managing the source code repositories. There is no shortage of GIT crash courses, references, howtos, tips and comprehensive documentation available from the Internet. For the sake of conciseness, we will only mention two documentation hubs from which you should be able to find your way:
In addition, let’s mention a simple tutorial for bootstrapping with GIT and day-to-day usage:
https://www.kernel.org/pub/software/scm/git/docs/gittutorial.html
Building Xenomai 3 from sources
This document contains instructions for building and installing Xenomai 3.x.
Xenomai-3 development tree
The Xenomai 3 development takes place in the xenomai repository.
-
the master branch tracks the development HEAD toward the next major release. This branch is never rebased.
-
the next branch tracks the latest commits pending merge into the master branch, it contains the most bleeding edge work. This branch may be rebased until it gets merged into the master branch eventually.
-
stable-* branches track updates to stable releases, such as stable-3.2.x which is the maintenance branch for the v3.2 major release. Those branches are never rebased.
If something goes wrong
First and foremost, please make sure to have a look at the troubleshooting guide.
If running any release from the discontinued Xenomai 2 series, or a Xenomai 3 release using the Cobalt real-time core, then you are running a dual kernel configuration. Xenomai 3 over the Mercury core stands for a single kernel configuration.
If still out of luck, and if your favorite Internet search engine did not help finding a similar/same problem already solved for another user, then you should try raising the issue on the main e-mail discussion list.
To maximize your chances of receiving quick and accurate responses to your request for help, you really want to follow these recommendations.